









Peter the Great Saint-Petersburg Polytechnic University (Research Laboratory of Ergonomics of Complex Systems, Head)
St Petersburg, St. Petersburg, Russian Federation
St. Petersburg, St. Petersburg, Russian Federation
Saint Petersburg, St. Petersburg, Russian Federation
Saint Petersburg, St. Petersburg, Russian Federation
Saint Petersburg, St. Petersburg, Russian Federation
UDC 331.101.1
The rapid development of ergatic systems, which integrate a human operator and automated devices into a single functional environment to ensure efficient operation in complex and aggressive man-made conditions, leads to a number of problems during their operation in extreme conditions. This list includes high levels of thermal exposure to the operator and technological equipment, humidity, chemical or radiation hazards, as well as the operator’s psychological stress and cognitive overloads. In such situations, robotic manipulators play a key role in ensuring the safety and stability of the technological process, as they can compensate partially or completely for human factor limitations. Among them, manipulators with translational links are of particular interest. They demonstrate high design and operational advantages for solving tasks where high linear positioning accuracy, simple control algorithms, and reliability in extreme conditions are required. The direct separation of operator functions and automation reduces the psycho-physiological workload, minimizes the risk of errors, and enhances the system ergonomics. Developing this class of ergatic systems requires an interdisciplinary approach that integrates engineering psychology, mechatronics, and materials science. Testing the prototype shows high ergonomics and reliability of manipulators with translational links, which confirms their promise for use in ergatic systems operating in aggressive conditions under stress-inducing influences on operators.
ergatic systems, manipulators with translational links, robotics, extreme conditions, ergonomics, stress, positioning accuracy, reliability, engineering psychology
Введение
В последние годы наблюдается интенсивное развитие эргатических систем, интегрирующих в единую функциональную среду человека-оператора и автоматизированные устройства для обеспечения эффективной работы в сложных и агрессивных техногенных условиях [1]. Особые задачи возникают при эксплуатации таких систем в экстремальных условиях – при высоком уровне воздействий на технологическое оборудование, влажности, химической или радиационной опасности, а также в условиях психологического стресса и когнитивных перегрузок оператора [2], [3].
В подобных ситуациях ключевую роль для обеспечения безопасности и устойчивости технологического процесса играют робототехнические манипуляторы, способные частично или полностью компенсировать ограничения человеческого фактора. Среди них особый интерес представляют манипуляторы с поступательными звеньями [4], [5].
Манипуляторы с поступательными звеньями демонстрируют конструктивные и эксплуатационные преимущества для решения задач, где необходимы высокая линейная точность позиционирования, простота алгоритмов управления и надежность в экстремальных условиях воздействия. Благодаря возможности выполнения линейных перемещений с минимальными угловыми ошибками, такие манипуляторы характеризуются повышенной точностью, жесткостью, а также способностью к эффективной интеграции с различными видами универсальных захватов и инструментальных насадок, что особенно востребовано в условиях быстроизменяющихся параметров среды. Кроме того, непосредственное разделение операторских и автоматизированных функций позволяет снизить психофизиологическую нагрузку на персонал, минимизировать риск человеческих ошибок и повысить общую эргономичность системы [6].
С учетом отмеченных аспектов, анализ достоинств манипуляторов с поступательными звеньями для использования в составе эргатических систем в агрессивных и стрессогенных средах представляется актуальной научной задачей, имеющей как теоретическое, так и практическое значение для повышения продуктивности, безопасности и устойчивости современных человеко-машинных комплексов. Разработка системной методологии проектирования данного класса эргатических систем обусловлена необходимостью создания конкурентоспособных отечественных решений для нефтегазовая отрасли, химического производства, морской робототехники и т. д.
В каждом из этих случаев архитектура с поступательными звеньями обеспечивает критически важные технологические преимущества манипуляторов – возможность телескопирования в замкнутом пространстве, постоянную жесткость в осевом направлении при сжатии, относительную простоту герметизации линейных перемещений по сравнению с вращательными соединениями.
1. Манипуляторы с поступательными звеньями в эргатических робототехнических системах: инженерно-психологический анализ
Для экстремальных условий наиболее эффективен и часто используется супервизорный режим управления, в котором оператор задает высокоуровневые команды, а низкоуровневое выполнение делегируется автоматике [7–9].
Манипуляторы с поступательными звеньями обладают рядом преимуществ при работе операторов в экстремальных условиях в супервизорном режиме. Рассмотрим технологические и эргономические свойства данных манипуляторов в эргатических системах.
1.1. Технологические преимущества манипуляторов с поступательными звеньями
Отметим ряд технико-технологических и эксплуатационных преимуществ рассматриваемых манипуляторов в эргатических системах:
– более простая защита от агрессивной среды – линейные приводы легче герметизировать, чем вращательные узлы. Для подводных приложений, как показано в исследовании гусеничных подводных платформ, герметизация поступательных механизмов требует меньшее количество уплотнительных элементов, что снижает вероятность отказа в абразивной среде [10];
– высокая точность позиционирования – в условиях, где визуальная обратная связь ограничена (мутная вода, пыль, туман), прямолинейное движение проще контролировать и прогнозировать;
– компактность в сложенном состоянии – для транспортировки в ограниченных объемах (космические аппараты, подводные аппараты) поступательные звенья позволяют создать телескопические конструкции, которые разворачиваются непосредственно на рабочем месте;
– жесткость конструкции – благодаря минимальному числу сочленений и отсутствию крутящих пар, системы с поступательными звеньями характеризуются высокой конструкционной жесткостью. Это важно для предотвращения нежелательных колебаний и повышения надежности манипулятора в реальных условиях эксплуатации [11];
– простота управления и регулирования – линейные перемещения проще поддаются вычислительному и программному управлению, что позволяет упростить алгоритмы и увеличить скорость реагирования манипулятора на действия оператора либо управляющих систем;
– безопасность для оператора – применение манипуляторов с поступательными звеньями позволяет дистанцировать оператора от опасной зоны, минимизировать воздействие агрессивных факторов и снизить уровень стресса при длительной работе в экстремальных условиях;
– гибкость интеграции с различными исполнительными органами – подобные конструкции позволяют легко менять захваты и инструменты, что важно для мультифункционального или аварийного использования на опасных объектах;
– надежность и долговечность – простота конструкции способствует высокой ремонтопригодности и устойчивости к агрессивным средам, что особенно важно для атомной, химической и нефтегазовой промышленности.
1.2. Эргономические преимущества и надежность человеко-машинного взаимодействия
– снижение физической и когнитивной нагрузки на оператора – автоматизация трудоемких операций с помощью манипуляторов такого типа значительно снижает психофизиологическую нагрузку, минимизируя вероятность операторских ошибок, особенно в условиях стресса [12], [13]. Манипуляторы с поступательными звеньями обеспечивают прямолинейные движения, что уменьшает необходимость оператора прикладывать значительные усилия для точного позиционирования. Благодаря этому факту снижаются мышечные напряжения и усталость, особенно при длительной работе или выполнении повторяющихся операций в агрессивных условиях. Простота кинематики поступательных звеньев облегчает управление манипулятором, делая движения предсказуемыми и интуитивными. Это снижает когнитивное напряжение и уменьшает вероятность ошибок, что критично в стрессовых и опасных средах. Управление становится более удобным и менее утомительным для оператора, что способствует повышению общей эффективности работы и безопасности;
– обеспечение устойчивого человеко-машинного континуума – эффективное распределение ролей между человеком и машиной повышает надежность общей эргатической системы даже при росте сложности или опасности производственной среды [14]. Ключевые механизмы обеспечения устойчивости связаны с делегированием функций автоматике [15]. Рутинные, опасные или ресурсоемкие задачи передаются манипуляторам и робототехническим системам, что снижает нагрузку на оператора и уменьшает вероятность ошибок, вызванных усталостью или стрессом. Оператор сохраняет контроль и принимает решения в критических ситуациях.
1.3. Проблемы проектирования и факторы эксплуатации манипуляторов с поступательными звеньями в агрессивных и стрессогенных условиях
Работа манипуляторов в агрессивных средах и условиях сопровождается системным усугублением классических проблем мехатронных систем и появлением специфических факторов, не имеющих аналогов в традиционной робототехнике:
– деградация прецизионных характеристик – типичные для поступательных систем погрешности, связанные с люфтом направляющих пар (0,01-0,1 мм в стандартном исполнении), при внедрении абразивных частиц в зону трения увеличиваются на порядок. Это делает неприменимыми стандартные решения по компенсации кинематических ошибок, так как характер износа становится стохастическим и непредсказуемым;
– коррозионное разрушение контактных пар – использование защитных люфтовых уплотнений, необходимых для компенсации температурных деформаций, создает «капсулы» с агрессивной средой внутри механизма. При этом скорости коррозионного износа в закрытых объемах в 3-5 раз превышают параметры открытых поверхностей, что требует переосмысления концепций защиты;
– термомеханические эффекты – в условиях циклических термоударов дифференциальные деформации материалов кареток и направляющих, обусловленные различием коэффициентов теплового расширения, приводят к потере преднатяжки подшипников скольжения или качения, что критично для манипуляторов, требующих 10⁷ циклов наработки;
– сложность герметизации динамических соединений: для поступательных перемещений длиной более 500 мм создание надежной бесстыковой защиты методом съемных чехлов становится конструктивно невыполнимой задачей. Решения на основе магнитных жидкостных уплотнений или лабиринтных систем требуют дополнительной энергетики и снижают КПД;
– ограниченность материалов и технологий – стандартные материалы направляющих (сталь 45, шарикоподшипниковая сталь ШХ15) в агрессивных средах теряют до 70% первоначальной прочности. Применение коррозионностойких сплавов увеличивает стоимость изделия в 8–12 раз, а использование композитов снижает жесткость системы на 30–40%, что требует кардинального пересмотра методов обеспечения кинематической точности;
– недостаточность экспериментальных данных – отсутствие апробированных методик ускоренных испытаний, адекватно моделирующих совместное воздействие агрессивных сред, химии и механических нагрузок. Это приводит к необходимости полномасштабных натурных испытаний, удлиняющих цикл разработки на 18–24 месяца и увеличивающих стоимость проекта в 3–4 раза;
– отсутствие экспериментальных эргономических данных о влиянии стресса на параметры деятельности оператора в человеко-машинной системе с рассматриваемым классом манипуляторов.
Таким образом, проектирование манипуляторов с поступательными звеньями для работы в системах работающих в агрессивных условиях среды при стрессогенных воздействиях на операторов представляет собой междисциплинарную проблему, требующую синтеза знаний из области инженерной психологи, эргономики, мехатроники, материаловедения, химической технологии и теории надежности, что и определяет необходимость разработки специализированной методологии, обобщающей теоретические подходы и практический опыт отечественных и зарубежных разработчиков.
2. Материалы, модели, эксперименты, методы и методики
2.1. Общая схема манипулятора и ключевые технические решения
Схема поступательной степени манипулятора используемого в экспериментальной части исследования показана на рисунке 1. В разработке и реализации конструкции манипулятора приняли участие В.М. Копылов и Е.А. Неткачева. Внешний вал является несущим, и воспринимает как силу веса (на сжатие в случае вертикальной степени и на смятие в случае горизонтальной), так и изгибающий момент. Последний может рассматриваться как пара сил, действующая на базе L, обозначенной на рисунке 1. Вращательный момент передается с помощью направляющих, скользящих по пазам на поверхности валов. Эти направляющие работают преимущественно на срез, и выполнены из более мягкого металла, чем сами валы, то есть изнашиваются быстрее, чем пазы.
Основа построения манипулятора – телескопические валы, способные передавать вращение, и при этом раздвигаться приблизительно вдвое. Длина вала определяет размеры его рабочей зоны.
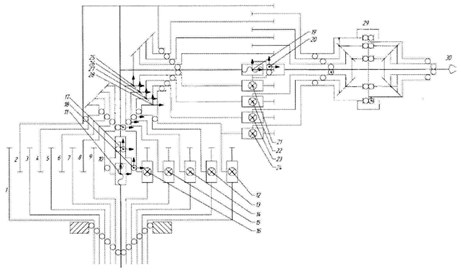
Рис. 1. Кинематическая схема манипулятора
Fig. 1. Kinematic diagram of the manipulator
Действие изгибающего момента приводит к тому, что зазоры в паре двух телескопических валов со стороны крепления горизонтального звена полностью устраняются, а зазоры с противоположной стороны – увеличиваются. Фактически, направляющие, расположенные с противоположной от горизонтального звена стороны вообще не нагружены поперечной силой, так же, как и направляющие на верхней стороне горизонтального звена. Тем не менее, они воспринимают вращательный момент, и необходимы для правильной центровки манипулятора.
Для устранения перекосов в манипуляторе предусмотрены центрирующие опоры с подшипником скольжения в виде втулки из спеченной бронзы или кольца с покрытием из графита или сульфида молибдена.
Передача вращения в колонну манипулятора производится с помощью коробки отбора мощности (КОМ). Этот узел решает две задачи: перенаправление потоков механической мощности и герметизация объема, в котором работает манипулятор.
Вращательные степени в манипуляторе реализуются с помощью дифференциальной конической передачи, то есть совместное движение двух приводных валов преобразуется в два движения звена – по тангажу и по крену. Вращение инструмента передается через шарнир качания тремя коническими шестернями (приводной, транзитной и исполнительной).
Поскольку каждая коническая шестерня подразумевает наличие люфта в зацеплении, для повышения точности манипулятора шестерни выполнены разрезными, с установкой упругого элемента между половинами шестерни.
Был изготовлен экспериментальный образец, который использовался для оценки технических и эргатических свойств манипулятора и системы «оператор–манипулятор».
2.2. Основные результаты технических испытаний манипулятора с поступательными звеньями
Манипулятор испытывался в двух режимах:
– проверка повторяемости,
– проверка работы по назначению с имитаторами полезной нагрузки.
Наиболее значимые проблемы, выявленные при испытаниях:
– перекос колонны,
– наличие люфта в степени качания конечного звена,
– наличие люфта в степени привода инструмента.
Перекос колонны возникал при выдвижении колонны более, чем на половину номинального хода. Его причиной было отсутствие центрирующего кольца на внешнем валу манипулятора, в результате чего направляющая, расположенная ближе к горизонтальному звену, пережималась, а противоположно расположенная направляющая напротив, вываливалась из своей канавки из-за смещения валов относительно центра. Введение центрирующего кольца устранило проблему, в результате была получена точность следования вертикальной траектории с СКО 0,68 мм. Данные испытаний приведены на рисунке 2.
Люфт в степени привода инструмента приводит к неопределенности позиции губок в пределах ±0,5 мм, что не является критическим значением, однако приводит к неуверенному захвату объекта, и невозможности захвата на чистом трении. В целом манипулятор отвечает заданным требованиям.
2.3. Результаты испытаний эргатической системы манипулятора с поступательными звеньями
Испытания при работе по назначению показали, что даже при наличии люфтов манипулятор способен выполнять c высокой точностью операции по взятию любого груза за такелажный элемент, переносу груза и установке его в транспортный контейнер. Также без замечаний отработаны операции по повороту кранов, задвижек, ручек в составе обслуживаемых объектов. Наличие люфта и связанной с ним ошибки вызвали проблемы при установке переносимого объекта в точности на предназначенное для него место. Выполнение этой операции оказалось возможным только при устранении люфта (на испытаниях производилось принудительной фиксацией степени свободы качания конечного звена). Операторы отмечают эргономичность и хорошие пользовательские свойства интерфейса манипулятора с поступательными звеньями при решении профессиональных задач в агрессивных рабочих средах и стрессогенных условиях.
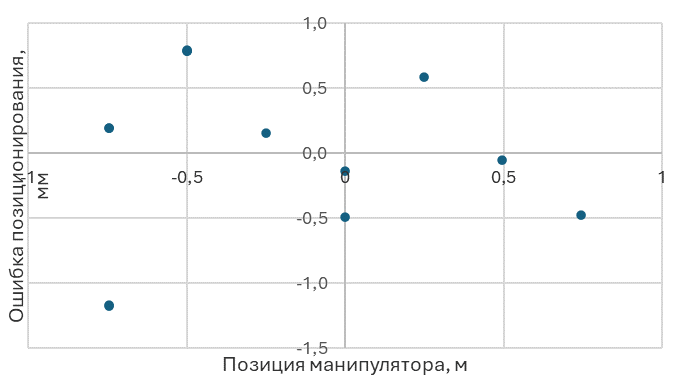
Рис. 2. Отклонение от траектории при следовании по вертикали
Fig. 2. Deviation from the trajectory when following vertically
Заключение и выводы
Испытания изготовленного в ЦНИИ РТК манипулятора с поступательными звеньями позволяют сделать вывод о перспективности применения данного типа манипуляторов в эргатических системах, действующих в агрессивных средах в стрессогенных для операторов условиях, связанных с угрозой жизни и здоровью.
В разработанном манипуляторе в результате устранения люфтов в конечном звене СКО ошибки позиционирования манипулятора оказались менее 1 мм во всей рабочей зоне при отработке любой позы манипулятора, что позволяет использовать его при осуществлении точных сенсомоторных действий и манипуляций с объектами.
Перспективным исследованием данных исследований является анализ патентного ландшафта в сфере проектирования робототехнических систем [16], [17].
Рассмотрены проблемные вопросы, выявленные при отработке манипулятора в эргатической системе экстремального профиля, и методы их решения. Даны рекомендации по проектированию и эксплуатации аналогичных робототехнических эргатических систем.
1. Sergeev S.F. Ergonomics of Immersive Environments: Methodology, Theory, Practice. Abstract for the Degree of Doctor of Psychology. Saint Petersburg; 2010. 42 p.
2. Nosikov M.V. Development of Control Systems and Human-Machine Interfaces for Intra-Chamber Radiation-Resistant Manipulator Systems. In: Proceedings of the 13th All-Russian Scientific and Practical Conference and the 14th Youth School-Seminar on Advanced Control Systems and Tasks Dedicated to the Memory of the Honorary Member of the Organizing Committee of the Conference, the Driver of the First Lunar Rover, Major General V.G. Dovgan; 2023 Apr 3-7. Dombay, Karachevo-Cherkess Republic; Taganrog: Lukomorye Publishing House; 2023. p. 391-400.
3. Dalyaev I.Y., Kopylov V.M., Truts A.A. Pyrochemical Technology of Spent Fuel Processing Robotization. Extreme Robotics. 2022;1(33):430-435.
4. Varkov A.A. Development and Research of an Industrial Manipulator Control System Based on a Motion Controller. Thesis for the Degree of Candidate of Technical Sciences; 2016. 146 p.
5. Popov E.P., Vereshchagin A.F., Zenkevich S.L. Manipulative Robots. Dynamics and Algorithms. Moscow: Nauka; 1978. 400 p.
6. Laryushkin P.A. Development and Research of a Spatial Manipulator of Parallel Structure with Three Translational Degrees of Freedom for Robotic Systems of Textile and Light Industry Enterprises. Thesis for the Degree of Candidate of Technical Sciences. Moscow; 2013. 169 p.
7. Sergeev A.V., Guk M.Yu. Mobile Space Robot Control with the Use of Virtual Reality and Force-Moment Sensing. Manned Spaceflight. 2018;(4):44-52.
8. Sergeev A.V., Titov V.V., Shardyko I.V. Induced Virtual Environment for Control of a Manipulator Designed for Working with Radioactive Materials. Robotics and Technical Cybernetics. 2021;9(1):32-41. DOIhttps://doi.org/10.31776/RTCJ.9104.
9. Sergeev A.V., Sergeev S.F. Virtual Control Elements in Induced Environments of Industrial Robot Interfaces. In: Proceedings of the All-Russian Scientific and Practical Online International Conference on Intelligent Technologies in Ergonomics and Cognitive Sciences; 2024 Jun 4-6; Bryansk. Bryansk: Bryansk State Technical University; 2024. p. 388-391.
10. Kopylov V.M. Promising Ways of Manipulators Installation Places Sealing for Hot Boxes. Robotics and Technical Cybernetics. 2025;13(2):143-150.
11. Kalendarev A.V., Glazunov V.A. Advantages of Robots and Parallel Structure Mechanisms. A Solution to the Problem of the Velocities of Manipulators with Parallel Structure. In: Nikitina EA, editor. Proceedings of the 7th All-Russian Conference of Students, Graduate Students and Young Scientists on Artificial Intelligence on Philosophy, Methodology, Innovations; 2013 Nov 13-15; Moscow: MSTU MIREA. Moscow: Radio i Svyaz; 2013; vol. 2. p. 93-96.
12. Sergeev S.F. Introduction to Cognitive Ergonomics and Engineering Psychology. Moscow; Vologda: Infra-Inzheneriya; 2024. 257 p.
13. Bokovikov A.K. Mechanisms of Stress Resistance Formation in Operators when Simulating Extreme Working Conditions. Yaroslavl. Thesis for the Degree of Candidate of Psychological Sciences. Yaroslavl; 2003. 181 p.
14. Kostin A.N. The Principle of Mutual Redundancy in the Distribution of Functions Between Man and Automation. Thesis for the Degree of Doctor of Psychology. Moscow; 2000. 351 p.
15. Golikov Y.Ya. Concepts of Adaptive Automation and Approaches to Man and Technology for Modern Man-Machine Complexes. In: Psychology of Adaptation and the Social Environment: Modern Approaches, Problems, and Perspectives. Moscow: Institute of Psychology RAS; 2007. p. 392-407.
16. Androsov K., Kirichek A., Spasennikov V. Features of Patenting Inventions in the Field of Computer Simulation and Image Recognition. Journal of Lifestyle and SDGs Review. 2025;5(8):e6991. DOIhttps://doi.org/10.47172/2965-730X.SDGsReview.v5.n08.pe06991.
17. Spasennikov V, Androsov K, Golubeva G. Ergonomic Factors in Patenting Computer Systems for Personnel’s Selection and Training. In: CEUR Workshop Proceedings : 30; 2020 Sep 22-25; Saint Petersburg; 2020. p. 1.