









Санкт-Петербургский политехнический университет Петра Великого (НИЛ «Эргономика сложных систем», заведующий)
Санкт-Петербург, г. Санкт-Петербург и Ленинградская область, Россия
Санкт-Петербург, г. Санкт-Петербург и Ленинградская область, Россия
Санкт-Петербург, г. Санкт-Петербург и Ленинградская область, Россия
Санкт-Петербург, г. Санкт-Петербург и Ленинградская область, Россия
Санкт-Петербург, г. Санкт-Петербург и Ленинградская область, Россия
УДК 331.101.1 Эргономика
Интенсивное развитие эргатических систем, интегрирующих в единую функциональную среду человека-оператора и автоматизированные устройства для обеспечения эффективной работы в сложных и агрессивных техногенных условиях ведет к появлению ряда проблем при эксплуатации таких систем в экстремальных условиях – при высоком уровне тепловых воздействий на оператора и технологическое оборудование, влажности, химической или радиационной опасности, а также в условиях психологического стресса и когнитивных перегрузок оператора. В подобных ситуациях ключевую роль для обеспечения безопасности и устойчивости технологического процесса играют робототехнические манипуляторы, способные частично или полностью компенсировать ограничения человеческого фактора. Среди них особый интерес представляют манипуляторы с поступательными звеньями. Они демонстрируют высокие конструктивные и эксплуатационные преимущества для решения задач, где необходимы высокая линейная точность позиционирования, простота алгоритмов управления и надежность в условиях экстремальных воздействий. Непосредственное разделение функций оператора и автоматики снижает психофизиологическую нагрузку, минимизирует риск ошибок и повышает эргономичность системы. Создание рассматриваемого класса эргатических систем требует междисциплинарного подхода, интегрирующего инженерную психологию, мехатронику и материаловедение. Испытания опытного образца показали высокую эргономичность и надежность манипуляторов с поступательными звеньями, что подтверждает их перспективность для использования в эргатических системах, действующих в агрессивных условиях при стрессогенных воздействиях на операторов.
эргатические системы, манипуляторы с поступательными звеньями, робототехника, экстремальные условия, эргономика, стресс, точность позиционирования, надежность, инженерная психология
Введение
В последние годы наблюдается интенсивное развитие эргатических систем, интегрирующих в единую функциональную среду человека-оператора и автоматизированные устройства для обеспечения эффективной работы в сложных и агрессивных техногенных условиях [1]. Особые задачи возникают при эксплуатации таких систем в экстремальных условиях – при высоком уровне воздействий на технологическое оборудование, влажности, химической или радиационной опасности, а также в условиях психологического стресса и когнитивных перегрузок оператора [2], [3].
В подобных ситуациях ключевую роль для обеспечения безопасности и устойчивости технологического процесса играют робототехнические манипуляторы, способные частично или полностью компенсировать ограничения человеческого фактора. Среди них особый интерес представляют манипуляторы с поступательными звеньями [4], [5].
Манипуляторы с поступательными звеньями демонстрируют конструктивные и эксплуатационные преимущества для решения задач, где необходимы высокая линейная точность позиционирования, простота алгоритмов управления и надежность в экстремальных условиях воздействия. Благодаря возможности выполнения линейных перемещений с минимальными угловыми ошибками, такие манипуляторы характеризуются повышенной точностью, жесткостью, а также способностью к эффективной интеграции с различными видами универсальных захватов и инструментальных насадок, что особенно востребовано в условиях быстроизменяющихся параметров среды. Кроме того, непосредственное разделение операторских и автоматизированных функций позволяет снизить психофизиологическую нагрузку на персонал, минимизировать риск человеческих ошибок и повысить общую эргономичность системы [6].
С учетом отмеченных аспектов, анализ достоинств манипуляторов с поступательными звеньями для использования в составе эргатических систем в агрессивных и стрессогенных средах представляется актуальной научной задачей, имеющей как теоретическое, так и практическое значение для повышения продуктивности, безопасности и устойчивости современных человеко-машинных комплексов. Разработка системной методологии проектирования данного класса эргатических систем обусловлена необходимостью создания конкурентоспособных отечественных решений для нефтегазовая отрасли, химического производства, морской робототехники и т. д.
В каждом из этих случаев архитектура с поступательными звеньями обеспечивает критически важные технологические преимущества манипуляторов – возможность телескопирования в замкнутом пространстве, постоянную жесткость в осевом направлении при сжатии, относительную простоту герметизации линейных перемещений по сравнению с вращательными соединениями.
1. Манипуляторы с поступательными звеньями в эргатических робототехнических системах: инженерно-психологический анализ
Для экстремальных условий наиболее эффективен и часто используется супервизорный режим управления, в котором оператор задает высокоуровневые команды, а низкоуровневое выполнение делегируется автоматике [7–9].
Манипуляторы с поступательными звеньями обладают рядом преимуществ при работе операторов в экстремальных условиях в супервизорном режиме. Рассмотрим технологические и эргономические свойства данных манипуляторов в эргатических системах.
1.1. Технологические преимущества манипуляторов с поступательными звеньями
Отметим ряд технико-технологических и эксплуатационных преимуществ рассматриваемых манипуляторов в эргатических системах:
– более простая защита от агрессивной среды – линейные приводы легче герметизировать, чем вращательные узлы. Для подводных приложений, как показано в исследовании гусеничных подводных платформ, герметизация поступательных механизмов требует меньшее количество уплотнительных элементов, что снижает вероятность отказа в абразивной среде [10];
– высокая точность позиционирования – в условиях, где визуальная обратная связь ограничена (мутная вода, пыль, туман), прямолинейное движение проще контролировать и прогнозировать;
– компактность в сложенном состоянии – для транспортировки в ограниченных объемах (космические аппараты, подводные аппараты) поступательные звенья позволяют создать телескопические конструкции, которые разворачиваются непосредственно на рабочем месте;
– жесткость конструкции – благодаря минимальному числу сочленений и отсутствию крутящих пар, системы с поступательными звеньями характеризуются высокой конструкционной жесткостью. Это важно для предотвращения нежелательных колебаний и повышения надежности манипулятора в реальных условиях эксплуатации [11];
– простота управления и регулирования – линейные перемещения проще поддаются вычислительному и программному управлению, что позволяет упростить алгоритмы и увеличить скорость реагирования манипулятора на действия оператора либо управляющих систем;
– безопасность для оператора – применение манипуляторов с поступательными звеньями позволяет дистанцировать оператора от опасной зоны, минимизировать воздействие агрессивных факторов и снизить уровень стресса при длительной работе в экстремальных условиях;
– гибкость интеграции с различными исполнительными органами – подобные конструкции позволяют легко менять захваты и инструменты, что важно для мультифункционального или аварийного использования на опасных объектах;
– надежность и долговечность – простота конструкции способствует высокой ремонтопригодности и устойчивости к агрессивным средам, что особенно важно для атомной, химической и нефтегазовой промышленности.
1.2. Эргономические преимущества и надежность человеко-машинного взаимодействия
– снижение физической и когнитивной нагрузки на оператора – автоматизация трудоемких операций с помощью манипуляторов такого типа значительно снижает психофизиологическую нагрузку, минимизируя вероятность операторских ошибок, особенно в условиях стресса [12], [13]. Манипуляторы с поступательными звеньями обеспечивают прямолинейные движения, что уменьшает необходимость оператора прикладывать значительные усилия для точного позиционирования. Благодаря этому факту снижаются мышечные напряжения и усталость, особенно при длительной работе или выполнении повторяющихся операций в агрессивных условиях. Простота кинематики поступательных звеньев облегчает управление манипулятором, делая движения предсказуемыми и интуитивными. Это снижает когнитивное напряжение и уменьшает вероятность ошибок, что критично в стрессовых и опасных средах. Управление становится более удобным и менее утомительным для оператора, что способствует повышению общей эффективности работы и безопасности;
– обеспечение устойчивого человеко-машинного континуума – эффективное распределение ролей между человеком и машиной повышает надежность общей эргатической системы даже при росте сложности или опасности производственной среды [14]. Ключевые механизмы обеспечения устойчивости связаны с делегированием функций автоматике [15]. Рутинные, опасные или ресурсоемкие задачи передаются манипуляторам и робототехническим системам, что снижает нагрузку на оператора и уменьшает вероятность ошибок, вызванных усталостью или стрессом. Оператор сохраняет контроль и принимает решения в критических ситуациях.
1.3. Проблемы проектирования и факторы эксплуатации манипуляторов с поступательными звеньями в агрессивных и стрессогенных условиях
Работа манипуляторов в агрессивных средах и условиях сопровождается системным усугублением классических проблем мехатронных систем и появлением специфических факторов, не имеющих аналогов в традиционной робототехнике:
– деградация прецизионных характеристик – типичные для поступательных систем погрешности, связанные с люфтом направляющих пар (0,01-0,1 мм в стандартном исполнении), при внедрении абразивных частиц в зону трения увеличиваются на порядок. Это делает неприменимыми стандартные решения по компенсации кинематических ошибок, так как характер износа становится стохастическим и непредсказуемым;
– коррозионное разрушение контактных пар – использование защитных люфтовых уплотнений, необходимых для компенсации температурных деформаций, создает «капсулы» с агрессивной средой внутри механизма. При этом скорости коррозионного износа в закрытых объемах в 3-5 раз превышают параметры открытых поверхностей, что требует переосмысления концепций защиты;
– термомеханические эффекты – в условиях циклических термоударов дифференциальные деформации материалов кареток и направляющих, обусловленные различием коэффициентов теплового расширения, приводят к потере преднатяжки подшипников скольжения или качения, что критично для манипуляторов, требующих 10⁷ циклов наработки;
– сложность герметизации динамических соединений: для поступательных перемещений длиной более 500 мм создание надежной бесстыковой защиты методом съемных чехлов становится конструктивно невыполнимой задачей. Решения на основе магнитных жидкостных уплотнений или лабиринтных систем требуют дополнительной энергетики и снижают КПД;
– ограниченность материалов и технологий – стандартные материалы направляющих (сталь 45, шарикоподшипниковая сталь ШХ15) в агрессивных средах теряют до 70% первоначальной прочности. Применение коррозионностойких сплавов увеличивает стоимость изделия в 8–12 раз, а использование композитов снижает жесткость системы на 30–40%, что требует кардинального пересмотра методов обеспечения кинематической точности;
– недостаточность экспериментальных данных – отсутствие апробированных методик ускоренных испытаний, адекватно моделирующих совместное воздействие агрессивных сред, химии и механических нагрузок. Это приводит к необходимости полномасштабных натурных испытаний, удлиняющих цикл разработки на 18–24 месяца и увеличивающих стоимость проекта в 3–4 раза;
– отсутствие экспериментальных эргономических данных о влиянии стресса на параметры деятельности оператора в человеко-машинной системе с рассматриваемым классом манипуляторов.
Таким образом, проектирование манипуляторов с поступательными звеньями для работы в системах работающих в агрессивных условиях среды при стрессогенных воздействиях на операторов представляет собой междисциплинарную проблему, требующую синтеза знаний из области инженерной психологи, эргономики, мехатроники, материаловедения, химической технологии и теории надежности, что и определяет необходимость разработки специализированной методологии, обобщающей теоретические подходы и практический опыт отечественных и зарубежных разработчиков.
2. Материалы, модели, эксперименты, методы и методики
2.1. Общая схема манипулятора и ключевые технические решения
Схема поступательной степени манипулятора используемого в экспериментальной части исследования показана на рисунке 1. В разработке и реализации конструкции манипулятора приняли участие В.М. Копылов и Е.А. Неткачева. Внешний вал является несущим, и воспринимает как силу веса (на сжатие в случае вертикальной степени и на смятие в случае горизонтальной), так и изгибающий момент. Последний может рассматриваться как пара сил, действующая на базе L, обозначенной на рисунке 1. Вращательный момент передается с помощью направляющих, скользящих по пазам на поверхности валов. Эти направляющие работают преимущественно на срез, и выполнены из более мягкого металла, чем сами валы, то есть изнашиваются быстрее, чем пазы.
Основа построения манипулятора – телескопические валы, способные передавать вращение, и при этом раздвигаться приблизительно вдвое. Длина вала определяет размеры его рабочей зоны.
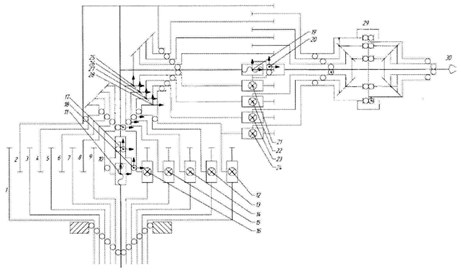
Рис. 1. Кинематическая схема манипулятора
Fig. 1. Kinematic diagram of the manipulator
Действие изгибающего момента приводит к тому, что зазоры в паре двух телескопических валов со стороны крепления горизонтального звена полностью устраняются, а зазоры с противоположной стороны – увеличиваются. Фактически, направляющие, расположенные с противоположной от горизонтального звена стороны вообще не нагружены поперечной силой, так же, как и направляющие на верхней стороне горизонтального звена. Тем не менее, они воспринимают вращательный момент, и необходимы для правильной центровки манипулятора.
Для устранения перекосов в манипуляторе предусмотрены центрирующие опоры с подшипником скольжения в виде втулки из спеченной бронзы или кольца с покрытием из графита или сульфида молибдена.
Передача вращения в колонну манипулятора производится с помощью коробки отбора мощности (КОМ). Этот узел решает две задачи: перенаправление потоков механической мощности и герметизация объема, в котором работает манипулятор.
Вращательные степени в манипуляторе реализуются с помощью дифференциальной конической передачи, то есть совместное движение двух приводных валов преобразуется в два движения звена – по тангажу и по крену. Вращение инструмента передается через шарнир качания тремя коническими шестернями (приводной, транзитной и исполнительной).
Поскольку каждая коническая шестерня подразумевает наличие люфта в зацеплении, для повышения точности манипулятора шестерни выполнены разрезными, с установкой упругого элемента между половинами шестерни.
Был изготовлен экспериментальный образец, который использовался для оценки технических и эргатических свойств манипулятора и системы «оператор–манипулятор».
2.2. Основные результаты технических испытаний манипулятора с поступательными звеньями
Манипулятор испытывался в двух режимах:
– проверка повторяемости,
– проверка работы по назначению с имитаторами полезной нагрузки.
Наиболее значимые проблемы, выявленные при испытаниях:
– перекос колонны,
– наличие люфта в степени качания конечного звена,
– наличие люфта в степени привода инструмента.
Перекос колонны возникал при выдвижении колонны более, чем на половину номинального хода. Его причиной было отсутствие центрирующего кольца на внешнем валу манипулятора, в результате чего направляющая, расположенная ближе к горизонтальному звену, пережималась, а противоположно расположенная направляющая напротив, вываливалась из своей канавки из-за смещения валов относительно центра. Введение центрирующего кольца устранило проблему, в результате была получена точность следования вертикальной траектории с СКО 0,68 мм. Данные испытаний приведены на рисунке 2.
Люфт в степени привода инструмента приводит к неопределенности позиции губок в пределах ±0,5 мм, что не является критическим значением, однако приводит к неуверенному захвату объекта, и невозможности захвата на чистом трении. В целом манипулятор отвечает заданным требованиям.
2.3. Результаты испытаний эргатической системы манипулятора с поступательными звеньями
Испытания при работе по назначению показали, что даже при наличии люфтов манипулятор способен выполнять c высокой точностью операции по взятию любого груза за такелажный элемент, переносу груза и установке его в транспортный контейнер. Также без замечаний отработаны операции по повороту кранов, задвижек, ручек в составе обслуживаемых объектов. Наличие люфта и связанной с ним ошибки вызвали проблемы при установке переносимого объекта в точности на предназначенное для него место. Выполнение этой операции оказалось возможным только при устранении люфта (на испытаниях производилось принудительной фиксацией степени свободы качания конечного звена). Операторы отмечают эргономичность и хорошие пользовательские свойства интерфейса манипулятора с поступательными звеньями при решении профессиональных задач в агрессивных рабочих средах и стрессогенных условиях.
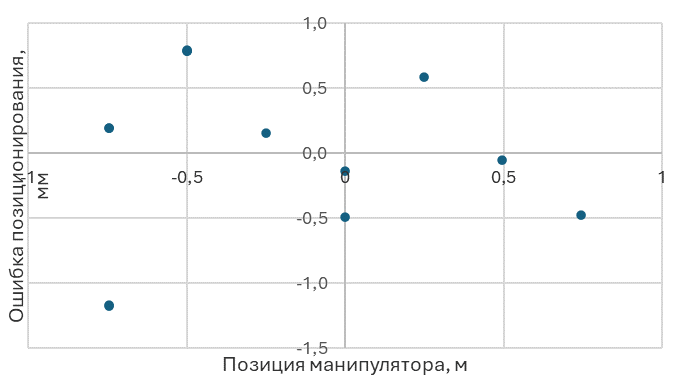
Рис. 2. Отклонение от траектории при следовании по вертикали
Fig. 2. Deviation from the trajectory when following vertically
Заключение и выводы
Испытания изготовленного в ЦНИИ РТК манипулятора с поступательными звеньями позволяют сделать вывод о перспективности применения данного типа манипуляторов в эргатических системах, действующих в агрессивных средах в стрессогенных для операторов условиях, связанных с угрозой жизни и здоровью.
В разработанном манипуляторе в результате устранения люфтов в конечном звене СКО ошибки позиционирования манипулятора оказались менее 1 мм во всей рабочей зоне при отработке любой позы манипулятора, что позволяет использовать его при осуществлении точных сенсомоторных действий и манипуляций с объектами.
Перспективным исследованием данных исследований является анализ патентного ландшафта в сфере проектирования робототехнических систем [16], [17].
Рассмотрены проблемные вопросы, выявленные при отработке манипулятора в эргатической системе экстремального профиля, и методы их решения. Даны рекомендации по проектированию и эксплуатации аналогичных робототехнических эргатических систем.
1. Сергеев, С.Ф. Эргономика иммерсивных сред: методология, теория, практика: специальность 19.00.03 "Психология труда, инженерная психология, эргономика" : автореферат диссертации на соискание ученой степени доктора психологических наук / Сергеев Сергей Фёдорович. – Санкт-Петербург, 2010. – 42 с. – EDN ZOAZTL.
2. Носиков М.В. Разработка систем управления и человеко-машинных интерфейсов для внутрикамерных радиационно-стойких манипуляционных систем. Перспективные системы и задачи управления : Материалы XVIII Всероссийской научно-практической конференции и XIV молодежной школы-семинара. Посвящается памяти Почетного члена Оргкомитета Конференции, водителя первого лунохода, генерал-майора В.Г. Довганя, п. Домбай, Карачево-Черкесская Республика, 03–07 апреля 2023 года. Таганрог: Общество с ограниченной ответственностью Издательство "Лукоморье", 2023. С. 391-400. EDN OIWWNY
3. Даляев И.Ю., Копылов В.М., Трутс А.А. Роботизация пирохимической технологии переработки ОЯТ // Экстремальная робототехника. 2022. № 1(33). С. 430-435. EDN BSMLJM.
4. Варков, А. А. Разработка и исследование системы управления манипуляционным промышленным роботом на базе контроллера движения : специальность 05.09.03 "Электротехнические комплексы и системы" : диссертация на соискание ученой степени кандидата технических наук / Варков Артём Александрович, 2016. – 146 с. – EDN ZOQHSC.
5. Попов Е.П., Верещагин А.Ф., Зенкевич С.Л. Манипуляционные роботы. Динамика и алгоритмы. М.: Наука, 1978. 400 с.
6. Ларюшкин, П. А. Разработка и исследование пространственного манипулятора параллельной структуры с тремя поступательными степенями свободы для робототехнических систем предприятий текстильной и лёгкой промышленности : специальность 05.02.13 "Машины, агрегаты и процессы (по отраслям)" : диссертация на соискание ученой степени кандидата технических наук / Ларюшкин Павел Андреевич. – Москва, 2013. – 169 с. – EDN SUVQKT.
7. Сергеев А.В., Гук М.Ю. Управление мобильным роботом космического назначения с применением виртуальной реальности и силомоментного очувствления // Пилотируемые полеты в космос. 2018. Вып. 4. С. 44-52. EDN YXRJXV.
8. Сергеев А.В., Титов В.В., Шардыко И.В. Индуцированная виртуальная среда для управления манипулятором, предназначенная для работы с радиоактивными материалами // Робототехника и техническая кибернетика. 2021. Т. 9, № 1. С. 32-41. DOIhttps://doi.org/10.31776/RTCJ.9104. EDN JFOOYE.
9. Сергеев А.В., Сергеев С.Ф. Виртуальные органы управления в индуцированных средах интерфейсов промышленных роботов. Интеллектуальные технологии в эргономике и когнитивных науках: Сборник материалов всероссийской научно-практической онлайн-конференции с международным участием, Брянск, 04–06 июня 2024 года. Брянск: Брянский государственный технический университет, 2024. С. 388-391. EDN PXWPZF.
10. Копылов В.М. Перспективные способы герметизации мест установки манипуляторов для горячих камер // Робототехника и техническая кибернетика. 2025. Т. 13. № 2. С. 143-150. EDN XXFOPK.
11. Календарев А.В., Глазунов В.А. Преимущества роботов и механизмов параллельной структуры. Решение задачи о скоростях манипуляторов параллельной структуры. Искусственный интеллект: философия, методология, инновации. Сборник трудов VII Всероссийской конференции студентов, аспирантов и молодых учёных. Часть 2. Секции IV–VI. г. Москва, МГТУ МИРЭА, 13–15 ноября 2013 г. Под ред. Е.А. Никитиной. М.: Радио и Связь, 2013. C. 93-96.
12. Сергеев С.Ф. Введение в когнитивную эргономику и инженерную психологию: учебное пособие. Москва; Вологда: Инфра-Инженерия, 2024. 257 с.
13. Боковиков, А.К. Механизмы формирования стрессоустойчивости операторов при моделировании экстремальных условий деятельности : специальность 19.00.03 "Психология труда, инженерная психология, эргономика" : диссертация на соискание ученой степени кандидата психологических наук / Боковиков Александр Константинович. – Ярославль, 2003. – 181 с. – EDN NOEGNT.
14. Костин, А. Н. Принцип взаимного резервирования при распределении функций между человеком и автоматикой : специальность 19.00.03 "Психология труда, инженерная психология, эргономика" : диссертация на соискание ученой степени доктора психологических наук / Костин Анатолий Николаевич. – Москва, 2000. – 351 с. – EDN NLPDJX.
15. Голиков Ю.Я. Концепция адаптивной автоматизации и подходы к человеку и технике для современных человеко-машинных комплексов // Психология адаптации и социальная среда: современные подходы, проблемы, перспективы : коллективная монография. Москва : Институт психологии РАН, 2007. С. 392-407. EDN ZFOADH.
16. Androsov K., Kirichek A., Spasennikov V. Features of Patenting Inventions in the Field of Computer Simulation and Image Recognition. Journal of Lifestyle and SDGs Review. 2025;5(8):e6991. DOIhttps://doi.org/10.47172/2965-730X.SDGsReview.v5.n08.pe06991. EDN RWJZDR.
17. Spasennikov V, Androsov K, Golubeva G. Ergonomic Factors in Patenting Computer Systems for Personnel’s Selection and Training. In: CEUR Workshop Proceedings : 30; 2020 Sep 22-25; Saint Petersburg; 2020. p. 1.